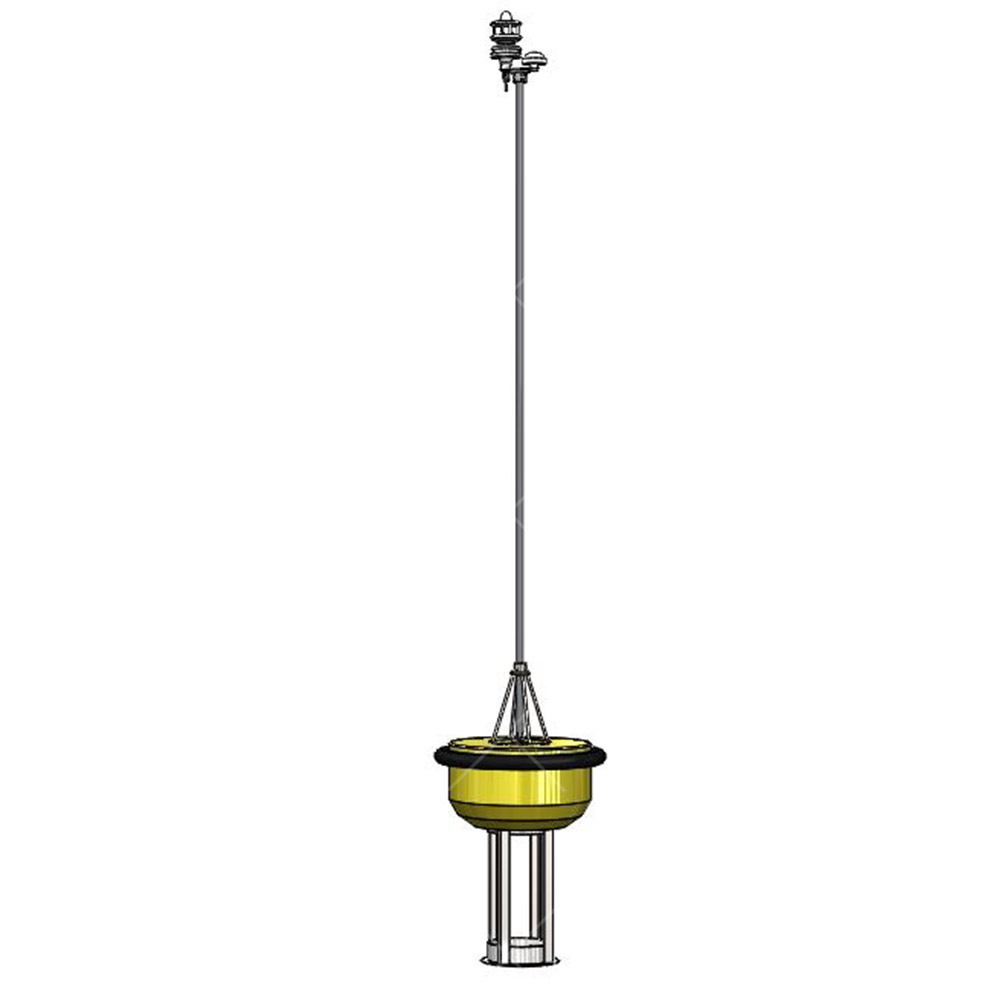

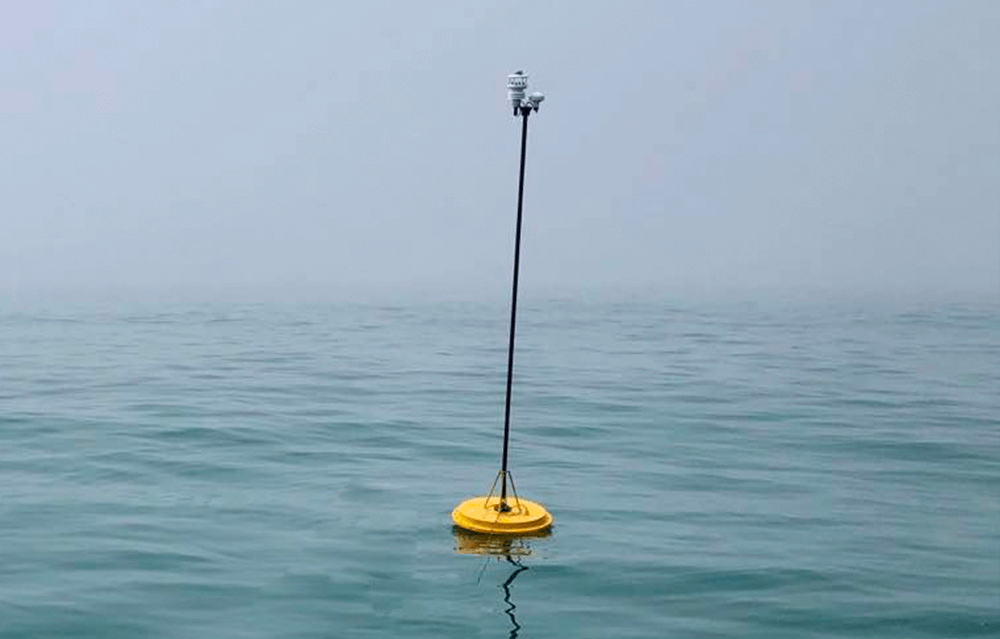
Kõrge täpsusega GPS, reaalajas side, ARM-protsessor, tuulepoi
Tehniline parameeter
Satelliidipõhine positsioneerimine: GPS-positsioneerimine
Andmeedastus: Vaikimisi Beidou side (saadaval 4G/Tiantong/Iridium)
Konfiguratsioonirežiim: Kohalik konfiguratsioon
Mõõtmisparameetrid
| Tuule kiirus | |
| Vahemik | 0,1 m/s kuni 60 m/s |
| Täpsus | ± 3%(40 m/s) |
| ± 5%(60 m/s) | |
| Resolutsioon | 0,01 m/s |
| Käivituskiirus | 0,1 m/s |
| Diskreetimissagedus | 1 Hz |
| Ühik | m/s, km/h, mph, kts, ft/min |
| Tuulsuund | |
| Vahemik | 0–359° |
| Täpsus | ± 3°(40 m/s) |
| ± 5°(60 m/s) | |
| Resolutsioon | 1° |
| Diskreetimissagedus | 1 Hz |
| Ühik | Kraad |
| Temperatuur | |
| Vahemik | -40°C ~+70°C |
| Resolutsioon | 0,1 °C |
| Täpsus | ± 0,3 °C temperatuuril 20 °C |
| Diskreetimissagedus | 1 Hz |
| Ühik | °C, °F, °K |
| Niiskus | |
| Vahemik | 0 ~100% |
| Resolutsioon | 0,01 |
| Täpsus | ± 2% temperatuuril 20 °C (suhteline õhuniiskus 10–90%) |
| Diskreetimissagedus | 1 Hz |
| Ühik | % suhtelist õhuniiskust, g/m³, g/kg |
| Kastepunkt | |
| Vahemik | -40°C ~ 70°C |
| Resolutsioon | 0,1 °C |
| Täpsus | ± 0,3 °C temperatuuril 20 °C |
| Ühik | °C, °F, °K |
| Diskreetimissagedus | 1 Hz |
| Õhurõhk | |
| Vahemik | 300 ~ 1100 hPa |
| Resolutsioon | 0,1 hPa |
| Täpsus | ± 0,5 hPa 25 °C juures |
| Diskreetimissagedus | 1 Hz |
| Ühik | hPa, baar, mmHg, tolli elavhõbedas |
| Sademed | |
| Mõõtevorm | Optika |
| Vahemik | 0 ~ 150 mm/h |
| SademedResolutsioon | 0,2 mm |
| Täpsus | 2% |
| Diskreetimissagedus | 1 Hz |
| Ühik | mm/h, mm/kogusademete hulk, mm/24 tundi, |
| Väljund | |
| Väljundkiirus | 1/s, 1/min, 1/h |
| Digitaalne väljund | RS232, RS422, RS485, SDI-12, NMEA, MODBUS, ASCII |
| Analoogväljund | kasutage teist seadet |
| Võimsus | |
| Toiteallikas | 5 t ~ 30 V alalisvool |
| Toide (nimivõimsus) 12 V alalisvool | 80 mA pideva suure energiatarbega režiim |
| 0,05 mA ökonoomne energiatarbimise režiim (1 h küsitlusrežiimis) | |
| Keskkonnatingimused | |
| IP-kaitsetase | IP66 |
| Töötemperatuuri vahemik | -40°C ~ 70°C |
| EMC-standard | Standard EN 61326:2013 |
| FCC CFR47 osad 15.109 | |
| CE-märk | √ |
| Vastab RoHS-ile | √ |
| Kaal | 0,8 kg |
Funktsioon
ARM-tuumaline suure tõhususega protsessor
Reaalajas suhtlus
Optimeeri algoritme töötlema andmeid
Kõrge täpsusega GPS-positsioneerimissüsteem