
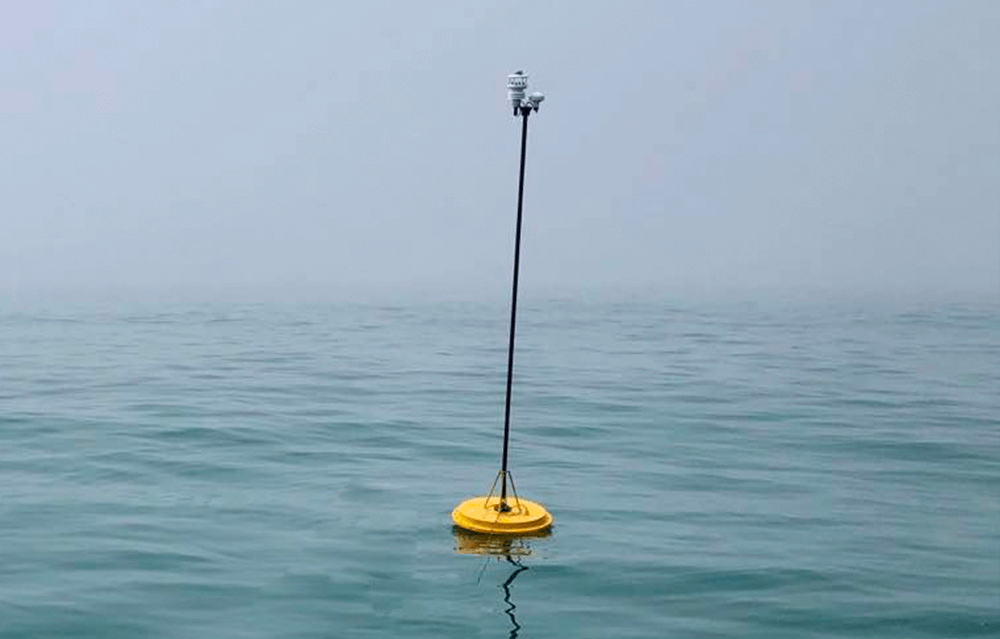
GPS haute précision Communication en temps réel Processeur ARM Bouée éolienne
Paramètres techniques
Positionnement par satellite : positionnement GPS
Transmission de données : Communication Beidou par défaut (4G/ Tiantong/Iridium disponible)
Mode de configuration : Configuration locale
Paramètres de mesure
| Vitesse du vent | |
| Gamme | 0,1 m/s - 60 m/s |
| Précision | ± 3%(40 m/s) |
| ± 5%(60 m/s) | |
| Résolution | 0,01 m/s |
| Vitesse de démarrage | 0,1 m/s |
| Taux d'échantillonnage | 1 Hz |
| Unité | m/s, km/h, mph, nœuds, pi/min |
| Ventdirection | |
| Gamme | 0-359° |
| Précision | ± 3°(40 m/s) |
| ± 5°(60 m/s) | |
| Résolution | 1° |
| Taux d'échantillonnage | 1 Hz |
| Unité | Degré |
| Température | |
| Gamme | -40°C ~+70°C |
| Résolution | 0,1 °C |
| Précision | ± 0,3 °C à 20 °C |
| Taux d'échantillonnage | 1 Hz |
| Unité | °C, °F, °K |
| Humidité | |
| Gamme | 0 ~ 100% |
| Résolution | 0,01 |
| Précision | ± 2 % à 20 °C (10 % à 90 % HR) |
| Taux d'échantillonnage | 1 Hz |
| Unité | % Rh, g/m3, g/Kg |
| Point de rosée | |
| Gamme | -40°C ~ 70°C |
| Résolution | 0,1 °C |
| Précision | ± 0,3 °C à 20 °C |
| Unité | °C, °F, °K |
| Taux d'échantillonnage | 1 Hz |
| Pression atmosphérique | |
| Gamme | 300 ~ 1100 hPa |
| Résolution | 0,1 hPa |
| Précision | ± 0,5 hPa à 25 °C |
| Taux d'échantillonnage | 1 Hz |
| Unité | hPa, barre, mmHg, inHg |
| Précipitations | |
| Formulaire de mesure | Optique |
| Gamme | 0 ~ 150 mm/h |
| PrécipitationsRésolution | 0,2 mm |
| Précision | 2% |
| Taux d'échantillonnage | 1 Hz |
| Unité | mm/h, mm/précipitations totales, mm/24 heures, |
| Sortir | |
| Taux de sortie | 1/s, 1/min, 1/h |
| Sortie numérique | RS232, RS422, RS485, SDI-12, NMEA, MODBUS, ASCII |
| Sortie analogique | utiliser un autre appareil |
| Pouvoir | |
| Alimentation électrique | 5 t~30 V CC |
| Puissance (nominale) 12 V CC | Mode de consommation électrique élevée continue de 80 mA |
| Mode de consommation d'énergie économique de 0,05 mA (1 h interrogé) | |
| Conditions environnementales | |
| Niveau de protection IP | IP66 |
| Plage de température de fonctionnement | -40°C ~ 70°C |
| norme CEM | BS EN 61326 : 2013 |
| FCC CFR47 parties 15.109 | |
| signe CE | √ |
| Conforme RoHS | √ |
| Poids | 0,8 kg |
Fonctionnalité
Processeur haute efficacité à cœur ARM
Communication en temps réel
Optimiser les algorithmes de traitement des données
Système de positionnement GPS de haute précision