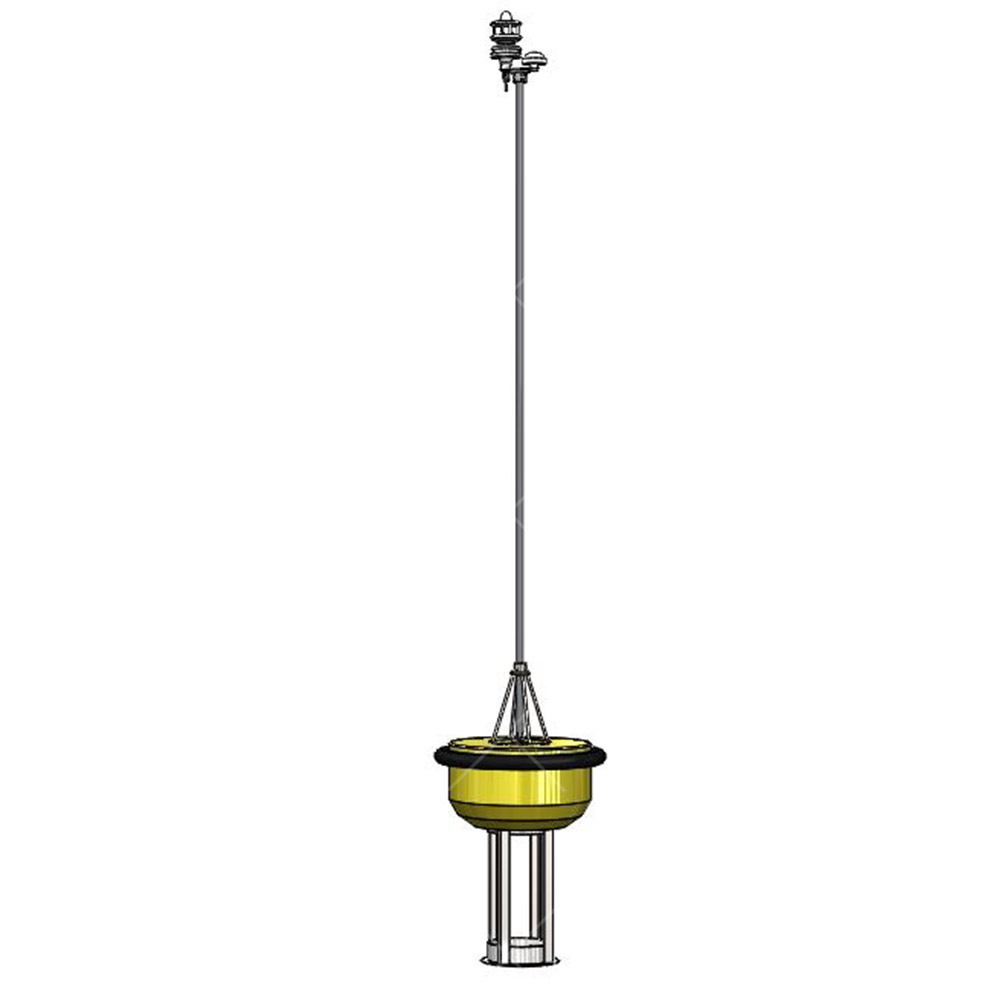

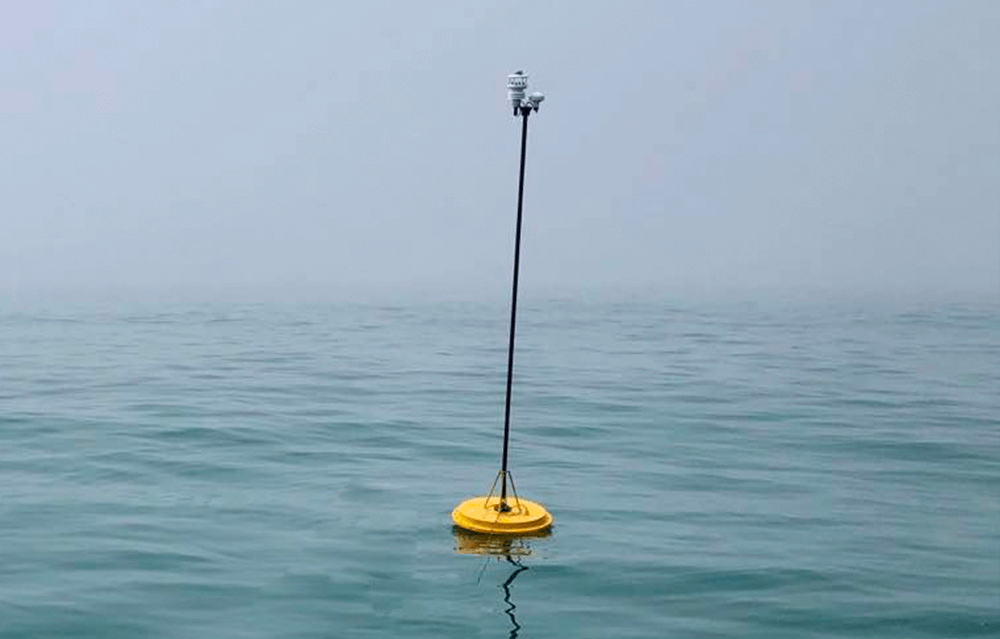
고정확도 GPS 실시간 통신 ARM 프로세서 풍력 부표
기술적 매개변수
위성 위치 지정: GPS 위치 지정
데이터 전송: 기본 Beidou 통신(4G/ Tiantong/Iridium 사용 가능)
구성 모드: 로컬 구성
측정 매개변수
| 풍속 | |
| 범위 | 0.1m/s - 60m/s |
| 정확성 | ± 3%(40m/초) |
| ± 5%(60m/s) | |
| 해결 | 0.01m/초 |
| 시작 속도 | 0.1m/초 |
| 샘플링 속도 | 1Hz |
| 단위 | m/s, km/hr, mph, kts, ft/min |
| 바람방향 | |
| 범위 | 0-359° |
| 정확성 | ± 3°(40m/초) |
| ± 5°(60m/s) | |
| 해결 | 1° |
| 샘플링 속도 | 1Hz |
| 단위 | 도 |
| 온도 | |
| 범위 | -40°C ~+70°C |
| 해결 | 0.1도 |
| 정확성 | ± 0.3°C @ 20°C |
| 샘플링 속도 | 1Hz |
| 단위 | °C, °F, °K |
| 습기 | |
| 범위 | 0 ~100% |
| 해결 | 0.01 |
| 정확성 | ± 2% @ 20°C (10%-90% RH) |
| 샘플링 속도 | 1Hz |
| 단위 | % RH, g/m3, g/Kg |
| 이슬점 | |
| 범위 | -40°C ~ 70°C |
| 해결 | 0.1도 |
| 정확성 | ± 0.3°C @ 20°C |
| 단위 | °C, °F, °K |
| 샘플링 속도 | 1Hz |
| 공기압 | |
| 범위 | 300 ~ 1100hPa |
| 해결 | 0.1hPa |
| 정확성 | ± 0.5hPa@25°C |
| 샘플링 속도 | 1Hz |
| 단위 | hPa, 바, mmHg, inHg |
| 강우 | |
| 측정 형태 | 광학 |
| 범위 | 0 ~ 150mm/시 |
| 강우해결 | 0.2mm |
| 정확성 | 2% |
| 샘플링 속도 | 1Hz |
| 단위 | mm/h, mm/총 강수량, mm/24시간, |
| 산출 | |
| 출력 속도 | 1/초, 1/분, 1/시간 |
| 디지털 출력 | RS232, RS422, RS485, SDI-12, NMEA, MODBUS, ASCII |
| 아날로그 출력 | 다른 장치를 사용하세요 |
| 힘 | |
| 전원 공급 장치 | 5t~30V 직류 |
| 전력(공칭) 12V DC | 80mA 연속 고전력 소비 모드 |
| 0.05mA 경제형 전력 소비 모드(1시간 폴링) | |
| 환경 조건 | |
| IP 보호 수준 | IP66 |
| 작동 온도 범위 | -40°C ~ 70°C |
| EMC 표준 | BS EN 61326:2013 |
| FCC CFR47 부품 15.109 | |
| CE 표시 | √ |
| RoHS 준수 | √ |
| 무게 | 0.8kg |
특징
ARM 코어 고효율 프로세서
실시간 커뮤니케이션
알고리즘 최적화 데이터 처리
고정확도 GPS 위치 시스템