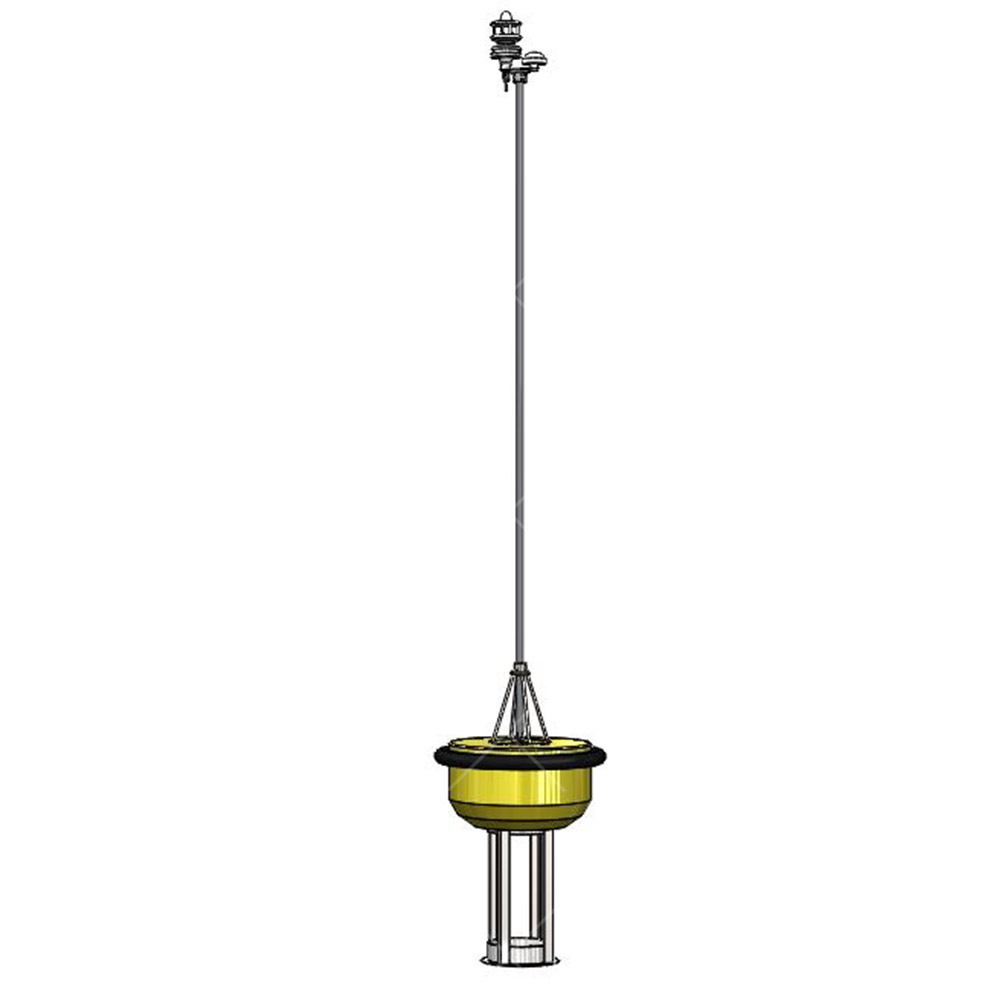

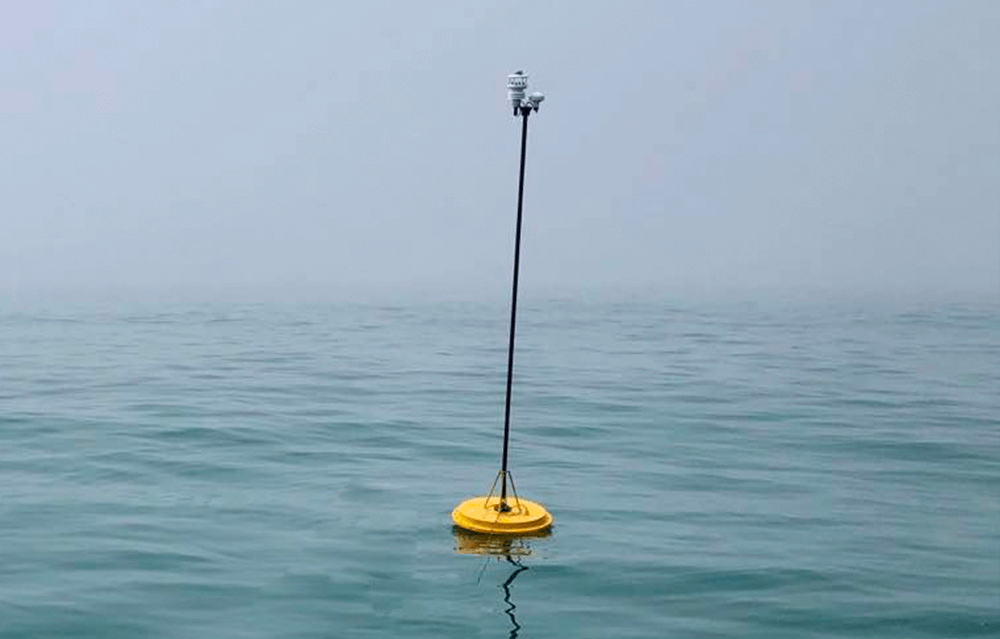
ਉੱਚ ਸ਼ੁੱਧਤਾ GPS ਰੀਅਲ-ਟਾਈਮ ਸੰਚਾਰ ARM ਪ੍ਰੋਸੈਸਰ ਵਿੰਡ ਬੁਆਏ
ਤਕਨੀਕੀ ਪੈਰਾਮੀਟਰ
ਸੈਟੇਲਾਈਟ ਪੋਜੀਸ਼ਨਿੰਗ: GPS ਪੋਜੀਸ਼ਨਿੰਗ
ਡਾਟਾ ਟ੍ਰਾਂਸਮਿਸ਼ਨ: ਡਿਫਾਲਟ ਬੇਇਡੋ ਸੰਚਾਰ (4G/ ਟਿਆਂਟੋਂਗ/ਇਰੀਡੀਅਮ ਉਪਲਬਧ)
ਸੰਰਚਨਾ ਮੋਡ: ਸਥਾਨਕ ਸੰਰਚਨਾ
ਮਾਪ ਪੈਰਾਮੀਟਰ
| ਹਵਾ ਦੀ ਗਤੀ | |
| ਸੀਮਾ | 0.1 ਮੀਟਰ/ਸੈਕਿੰਡ - 60 ਮੀਟਰ/ਸੈਕਿੰਡ |
| ਸ਼ੁੱਧਤਾ | ± 3%(40 ਮੀਟਰ/ਸੈਕਿੰਡ) |
| ± 5%(60 ਮੀਟਰ/ਸੈਕਿੰਡ) | |
| ਮਤਾ | 0.01 ਮੀਟਰ/ਸਕਿੰਟ |
| ਸ਼ੁਰੂਆਤੀ ਗਤੀ | 0.1 ਮੀਟਰ/ਸਕਿੰਟ |
| ਸੈਂਪਲਿੰਗ ਦਰ | 1 ਹਰਟਜ਼ |
| ਯੂਨਿਟ | ਮੀ/ਸਕਿੰਟ, ਕਿਮੀ/ਘੰਟਾ, mph, kts, ਫੁੱਟ/ਮਿੰਟ |
| ਹਵਾਦਿਸ਼ਾ | |
| ਸੀਮਾ | 0-359° |
| ਸ਼ੁੱਧਤਾ | ± 3°(40 ਮੀਟਰ/ਸੈਕਿੰਡ) |
| ± 5°(60 ਮੀਟਰ/ਸੈਕਿੰਡ) | |
| ਮਤਾ | 1° |
| ਸੈਂਪਲਿੰਗ ਦਰ | 1 ਹਰਟਜ਼ |
| ਯੂਨਿਟ | ਡਿਗਰੀ |
| ਤਾਪਮਾਨ | |
| ਸੀਮਾ | -40°C ~+70°C |
| ਮਤਾ | 0.1°C |
| ਸ਼ੁੱਧਤਾ | ± 0.3°C @ 20°C |
| ਸੈਂਪਲਿੰਗ ਦਰ | 1 ਹਰਟਜ਼ |
| ਯੂਨਿਟ | °C, °F, °K |
| ਨਮੀ | |
| ਸੀਮਾ | 0 ~100% |
| ਮਤਾ | 0.01 |
| ਸ਼ੁੱਧਤਾ | ± 2% @ 20°C (10%-90% RH) |
| ਸੈਂਪਲਿੰਗ ਦਰ | 1 ਹਰਟਜ਼ |
| ਯੂਨਿਟ | % ਆਰਐਚ, ਗ੍ਰਾਮ/ਮੀ3, ਗ੍ਰਾਮ/ਕਿਲੋਗ੍ਰਾਮ |
| ਤ੍ਰੇਲ-ਬਿੰਦੂ | |
| ਸੀਮਾ | -40°C ~ 70°C |
| ਮਤਾ | 0.1°C |
| ਸ਼ੁੱਧਤਾ | ± 0.3°C @ 20°C |
| ਯੂਨਿਟ | °C, °F, °K |
| ਸੈਂਪਲਿੰਗ ਦਰ | 1 ਹਰਟਜ਼ |
| ਹਵਾ ਦਾ ਦਬਾਅ | |
| ਸੀਮਾ | 300 ~ 1100hPa |
| ਮਤਾ | 0.1 ਐਚਪੀਏ |
| ਸ਼ੁੱਧਤਾ | ± 0.5hPa@25°C |
| ਸੈਂਪਲਿੰਗ ਦਰ | 1 ਹਰਟਜ਼ |
| ਯੂਨਿਟ | hPa, ਬਾਰ, mmHg, inHg |
| ਮੀਂਹ | |
| ਮਾਪਣ ਵਾਲਾ ਫਾਰਮ | ਆਪਟਿਕਸ |
| ਸੀਮਾ | 0 ~ 150 ਮਿਲੀਮੀਟਰ/ਘੰਟਾ |
| ਮੀਂਹਮਤਾ | 0.2 ਮਿਲੀਮੀਟਰ |
| ਸ਼ੁੱਧਤਾ | 2% |
| ਸੈਂਪਲਿੰਗ ਦਰ | 1 ਹਰਟਜ਼ |
| ਯੂਨਿਟ | ਮਿਲੀਮੀਟਰ/ਘੰਟਾ, ਮਿਲੀਮੀਟਰ/ਕੁੱਲ ਬਾਰਿਸ਼, ਮਿਲੀਮੀਟਰ/24 ਘੰਟੇ, |
| ਆਉਟਪੁੱਟ | |
| ਆਉਟਪੁੱਟ ਦਰ | 1/ਸਕਿੰਟ, 1/ਮਿੰਟ, 1/ਘੰਟਾ |
| ਡਿਜੀਟਲ ਆਉਟਪੁੱਟ | RS232, RS422, RS485, SDI-12, NMEA, MODBUS, ASCII |
| ਐਨਾਲਾਗ ਆਉਟਪੁੱਟ | ਕੋਈ ਹੋਰ ਡਿਵਾਈਸ ਵਰਤੋ |
| ਪਾਵਰ | |
| ਬਿਜਲੀ ਦੀ ਸਪਲਾਈ | 5 ਟੀ ~ 30V ਡੀ.ਸੀ. |
| ਪਾਵਰ (ਨਾਮਮਾਤਰ) 12 V DC | 80 mA ਨਿਰੰਤਰ ਉੱਚ ਪਾਵਰ ਖਪਤ ਮੋਡ |
| 0.05mA ਆਰਥਿਕ ਬਿਜਲੀ ਖਪਤ ਮੋਡ (1 ਘੰਟਾ ਪੋਲ ਕੀਤਾ ਗਿਆ) | |
| ਵਾਤਾਵਰਣ ਦੀਆਂ ਸਥਿਤੀਆਂ | |
| ਆਈਪੀ ਸੁਰੱਖਿਆ ਪੱਧਰ | ਆਈਪੀ66 |
| ਕੰਮ ਕਰਨ ਵਾਲਾ ਤਾਪਮਾਨ ਸੀਮਾ | -40°C ~ 70°C |
| EMC ਮਿਆਰ | ਬੀਐਸ ਐਨ 61326: 2013 |
| FCC CFR47 ਹਿੱਸੇ 15.109 | |
| ਸੀਈ ਚਿੰਨ੍ਹ | √ |
| RoHS ਦੇ ਅਨੁਕੂਲ | √ |
| ਭਾਰ | 0.8 ਕਿਲੋਗ੍ਰਾਮ |
ਵਿਸ਼ੇਸ਼ਤਾ
ਏਆਰਐਮ ਕੋਰ ਉੱਚ ਕੁਸ਼ਲਤਾ ਵਾਲਾ ਪ੍ਰੋਸੈਸਰ
ਅਸਲ-ਸਮੇਂ ਦਾ ਸੰਚਾਰ
ਐਲਗੋਰਿਦਮ ਪ੍ਰਕਿਰਿਆ ਡੇਟਾ ਨੂੰ ਅਨੁਕੂਲ ਬਣਾਓ
ਉੱਚ ਸ਼ੁੱਧਤਾ GPS ਪੋਜੀਸ਼ਨਿੰਗ ਸਿਸਟਮ