



Дрифтинги яклухт бо ҷараён барои назорат кардани ҷараёнҳои сатҳи баҳр ва ҳарорати маълумот дар бораи уқёнус
Мо ҳамеша мувофиқи тағйироти вазъият фикр мекунем ва амал мекунем ва калон мешавем. Мо мақсади ба даст овардани ақл ва ҷисми бойтар, инчунин зиндагӣ барои яклухт Drifting бо ҷараён барои мониторинги ҷараёни сатҳи баҳр ва ҳароратибанди маълумот дар уқёнус, Мо пеш аз ҳама барои сохтани робитаҳои мусбӣ ва муфид бо ҳама провайдерҳои сайёра ҷустуҷӯ мекардем. Мо шуморо самимона истиқбол мекунем, ки бешубҳа бо мо дар тамос шавед, то муҳокимаҳоро дар бораи он ки мо метавонем онро ба вуҷуд орем, оғоз кунем.
Мо ҳамеша мувофиқи тағйироти вазъият фикр мекунем ва амал мекунем ва калон мешавем. Мо мақсад дорем, ки ба даст овардани ақл ва ҷисми бойтар ва инчунин барои зиндагӣбанди маълумот дар уқёнус, Муҳандиси тахассусии R&D барои хидматрасонии машваратии шумо хоҳад буд ва мо барои қонеъ кардани ниёзҳои шумо кӯшиш хоҳем кард. Пас, боварӣ ҳосил кунед, ки шумо барои дархостҳо бо мо дар тамос шавед. Шумо метавонед ба мо паёмҳои электронӣ фиристед ё барои тиҷорати хурд ба мо занг занед. Шумо инчунин метавонед худатон ба тиҷорати мо биёед, то бо мо бештар шинос шавед. Ва мо бешубҳа ба шумо беҳтарин нархнома ва хидмати пас аз фурӯшро пешниҳод хоҳем кард. Мо омодаем, ки бо тоҷирони худ муносибатҳои устувор ва дӯстона барқарор кунем. Барои ноил шудан ба муваффақияти мутақобила, мо саъю кӯшиш мекунем, ки ҳамкории мустаҳкам ва кори муоширати шаффофро бо ҳамсафаронамон ба роҳ монем. Пеш аз ҳама, мо дар ин ҷо ҳастем, ки дархостҳои шуморо дар бораи ҳама гуна маҳсулот ва хидмати мо қабул кунем.
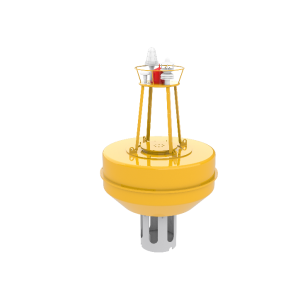
Параметрҳои техникӣ
| Шарт: | Индекс |
| Андоза | φ504мм |
| Метерейл | Поликарбонати тағирёфтаи қувваташ баланд |
| Ҷойгиршавӣ тавассути | GPS ё Beidou |
| Басомади интиқол. | 1 соат пешфарз, танзимшаванда: 1 дақиқа ~ 12 соат |
| Сенсори ҳарорат | Диапазон: -10 ~ 50 ℃, дақиқӣ: 0,1 ℃ |
| Интиқоли маълумот | Iridium пешфарз (имконоти сершумор: Beidou/Tiantong/4G) |
| Реҷаи танзим ва санҷиш | дурдаст |
| Ба васеъ шино кунед | φ90 см, H: 4,4м |
| Чуқурии бодбон | 1~20м |
| Вазни холис | 12кг |
| Пайгирии дрейф | Авто |
| Ҳолати фурӯзон/хомӯш | Калиди як тамоси Magne |
| Ҳарорати кор | 0℃-50℃ |
| Ҳарорати нигоҳдорӣ | -20℃-60℃ |
Мо ҳамеша мувофиқи тағйироти вазъият фикр мекунем ва амал мекунем ва калон мешавем. Мо мақсади ба даст овардани ақл ва ҷисми бойтар ва инчунин зиндагӣ барои Дрифтинги яклухт бо ҷараёнро барои назорат кардани ҷараёни сатҳи баҳр ва ҳарорати маълумот дар уқёнус. Мо дар ҷустуҷӯи робитаҳои мусбӣ ва муфид бо ҳама провайдерҳои сайёра будем. Мо шуморо самимона истиқбол мекунем, ки бешубҳа бо мо дар тамос шавед, то муҳокимаҳоро дар бораи он ки мо метавонем онро ба вуҷуд орем, оғоз кунем.
Фурӯши яклухт бо ҷараён барои назорат кардани ҷараёни сатҳи баҳр ва ҳарорати маълумот дар уқёнус, муҳандиси тахассусии R&D барои хидматрасонии машваратии шумо хоҳад буд ва мо тамоми кӯшишро ба харҷ медиҳем, то ба талаботи шумо ҷавобгӯ бошад. Пас, боварӣ ҳосил кунед, ки шумо барои дархостҳо бо мо дар тамос шавед. Шумо метавонед ба мо паёмҳои электронӣ фиристед ё барои тиҷорати хурд ба мо занг занед. Шумо инчунин метавонед худатон ба тиҷорати мо биёед, то бо мо бештар шинос шавед. Ва мо бешубҳа ба шумо беҳтарин нархнома ва хидмати пас аз фурӯшро пешниҳод хоҳем кард. Мо омодаем, ки бо тоҷирони худ муносибатҳои устувор ва дӯстона барқарор кунем. Барои ноил шудан ба муваффақияти мутақобила, мо саъю кӯшиш мекунем, ки ҳамкории мустаҳкам ва кори муоширати шаффофро бо ҳамсафаронамон ба роҳ монем. Пеш аз ҳама, мо дар ин ҷо ҳастем, ки дархостҳои шуморо дар бораи ҳама гуна маҳсулот ва хидмати мо қабул кунем.
Категорияҳои маҳсулот
-

FS- Пайвасткунаки резинии микро даврашакл (5 алоқа)
-
Мошини яклухти чинии Dock Wave Breakwater Breaker ...
-
Завод 15ppm ҳушдорро барои обҳои нафт таъмин кардааст...
-

FS- Пайвасткунаки резинии микро даврашакл (10 алоқа)
-

Самти баландии мавҷи мавҷи Чин...
-
Яклухт маъмул S16 Метеороло параметри бисёрҷониба...



